
Im Zusammenhand mit Drohnen, Quadrocoptern und Multicoptern hört man immer Häufiger das Wort „Gimbal“ – besonders wenn es um Foto-Drohnen geht.

Aber was ist eigentlich ein Gimbal? Und wie funktioniert ein Gimbal? Ein Gimbal ist per Definition (Wikipedia: Gimbal) erst einmal eine kardanische Aufhängung / Lagerung – also eine Lagerung in 2 Ebenen mit rechtwinklig zueinander angeordneten Lagern. Diese spezielle Anordnung und ein ausgewogener Schwerpunkt ermöglicht dem Objekt in der Mitte eine dreidimensionale Bewegung. Bei einem entsprechend ausgerichteten Schwerpunkt würden Bewegungen der Umgebung automatisch ausgeglichen. Man nutzt dieses Prinzip z.B. auf Schiffen, um einen Kompass so zu lagern. Trotz Wellenbewegung bleibt der Kompass dadurch immer in Waage.
Dieses Prinzip nutzt mal bei RC-Drohnen, um so die Kamera aufzuhängen. Allerdings genügt das Prinzip Schwerpunk nicht, um das Videobild der Kamera ordentlich zu stabilisieren. Die feinen Bewegungen und Ruckler der Drohne sind viel zu schnell und die Masse der Kamera wäre viel zu träge. Schwingungen und Bewegungen würden zwar gedämpft aber nicht eliminiert werden.
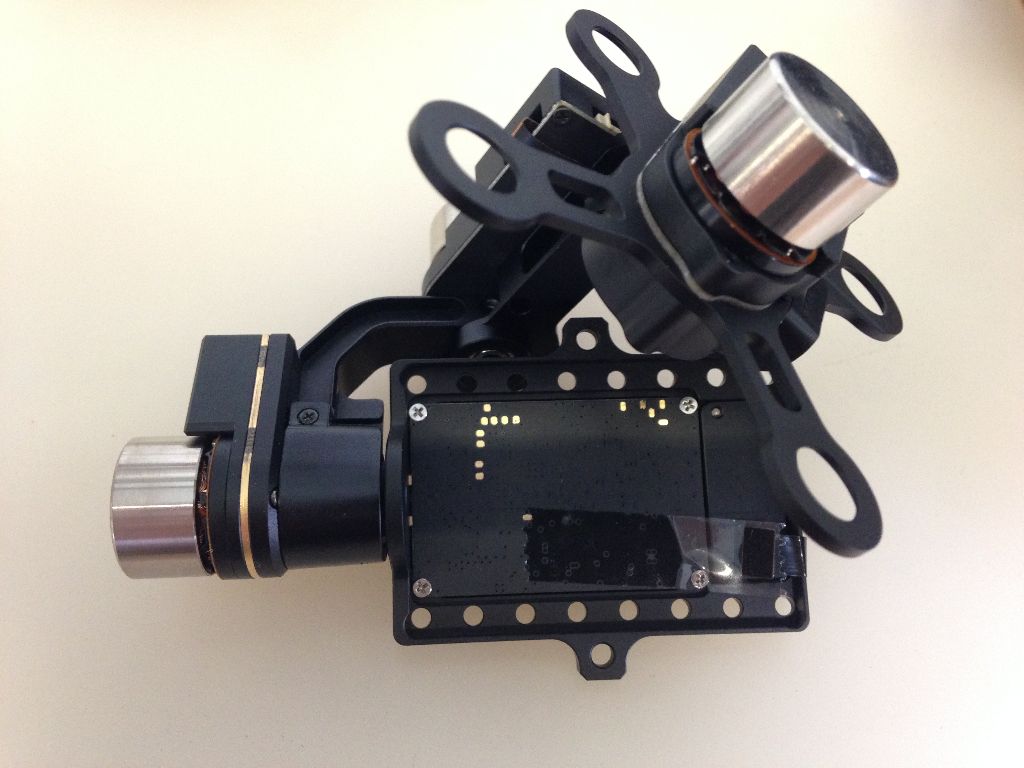 Daher hängt man einen Kamera-Gimbal nicht an drehbaren Lagern auf, sondern an Elektromotoren. Diese Brushless-Motoren (=bürstenlos) sind extrem schnell. Außerdem wird an der Kameraaufhängung ein Sensorpaket befestigt – eine so genannte IMU (Inertial measurement unit), die die Lage und Beschleunigung der Kamera im Raum in Echtzeit messen kann. (Gimbal-Systeme haben in der Regel eine eigene IMU – in einzelnen Fällen wird aber auch die bereits existierende IMU des Copters mit genutzt / mit angezapft. Der Copter selbst benötigt nämlich ebenfalls eine IMU, um seine eigene Lage auszugleichen und nicht umzukippen z.B. bei Wind).
Daher hängt man einen Kamera-Gimbal nicht an drehbaren Lagern auf, sondern an Elektromotoren. Diese Brushless-Motoren (=bürstenlos) sind extrem schnell. Außerdem wird an der Kameraaufhängung ein Sensorpaket befestigt – eine so genannte IMU (Inertial measurement unit), die die Lage und Beschleunigung der Kamera im Raum in Echtzeit messen kann. (Gimbal-Systeme haben in der Regel eine eigene IMU – in einzelnen Fällen wird aber auch die bereits existierende IMU des Copters mit genutzt / mit angezapft. Der Copter selbst benötigt nämlich ebenfalls eine IMU, um seine eigene Lage auszugleichen und nicht umzukippen z.B. bei Wind).
 Diese ermittelten Sensor- und Lagedaten werden genutzt, um die Kamera in Position zu halten. Erkennen die Sensoren auch nur eine minimale Lageänderung / Abweichung (z.B. eine beginnende Neigung zur Seite), so werden die entsprechenden Motoren an der Gimbal-Lagerung angesteuert, um die Kamera entsprechend entgegengesetzt zu bewegen um die waage Position zu halten. Diese Steuerung und Sensorauswertung übernimmt eine zentrale Steuerung, die so genannte Gimbal Control Unit (GCU)
Diese ermittelten Sensor- und Lagedaten werden genutzt, um die Kamera in Position zu halten. Erkennen die Sensoren auch nur eine minimale Lageänderung / Abweichung (z.B. eine beginnende Neigung zur Seite), so werden die entsprechenden Motoren an der Gimbal-Lagerung angesteuert, um die Kamera entsprechend entgegengesetzt zu bewegen um die waage Position zu halten. Diese Steuerung und Sensorauswertung übernimmt eine zentrale Steuerung, die so genannte Gimbal Control Unit (GCU)
Die Technik ist mittlerweile so gut und schnell, daß Verzögerungen nicht mehr erkennbar sind. Das aufgenommene Kamerabild / Videomaterial erscheint vollkommen ruhig, obwohl sich der Quadcopter im Wind schnell bewegt und schwankt / ruckelt.
Um diese schnellen und präzisen Bewegungen ausführen zu können, muss die Kamera im Gimbal – also in der Lagerung – extrem ausgewogen sein. Der Schwerpunkt muss genau mittig liegen, sodaß die Motoren in der „Nullstellung“ eigentlich keine Kraft benötigen und die Kamera sich nicht bewegt (obwohl sie in alle Richtungen beweglich gelagert ist). Nur so kann die volle Kapazität und Kraft der Motoren effizient für die Bildstabilisierung und für den Bewegungsausgleich genutzt werden.
 Aus diesem Grund gibt es auch nur selten „universelle“ Gimbals, sondern jeder Gimbal ist genau auf die zu verwendende Kamera und deren Gewicht / Schwerpunkt zugeschnitten. Daher gibt es auf dem Markt auch eine Vielzahl von Gimbal-Systemen. Zusätzlich ist der Gimbal natürlich auch in Punkto Befestigung / Montagemöglichkeiten oft für einen speziellen Quadcopter oder Multicopter vorbereitet. manche Copter haben gar einen eigenen Gimbal ab Werk (Dji Phantom 2 VISION oder Phantom 2 VISION+ / Dji Inspire 1 / Yuneec Q500)
Aus diesem Grund gibt es auch nur selten „universelle“ Gimbals, sondern jeder Gimbal ist genau auf die zu verwendende Kamera und deren Gewicht / Schwerpunkt zugeschnitten. Daher gibt es auf dem Markt auch eine Vielzahl von Gimbal-Systemen. Zusätzlich ist der Gimbal natürlich auch in Punkto Befestigung / Montagemöglichkeiten oft für einen speziellen Quadcopter oder Multicopter vorbereitet. manche Copter haben gar einen eigenen Gimbal ab Werk (Dji Phantom 2 VISION oder Phantom 2 VISION+ / Dji Inspire 1 / Yuneec Q500)
Diese unterscheiden sich auch von der Arbeitsweise in diversen Faktoren. Manche Gimbals gleichen Bewegungen auch in einer oder zwei Dimensionen aus. Eine vollwertige Stabilisierung wird natürlich nur dann erreicht, wenn der Gimbal die Bewegungen in alle drei Dimensionen ausgleicht. Solche Gimbals nennt man dann 3D-Gimbals – z.B. Zenmuse H3-3D oder H4-3D (alternativ 2D Gimbal beim Ausgleich in nur eine Dimension – z.B. Zenmuse H3-2D). Eindimensional ausgleichende Gimbals sind nur selten zu finden – wie an der Dji Phantom 2 VISION (erste Version).
Zweites entscheidendes Merkmal ist die selbst steuerbare Bewegung der Kamera. Dadurch, daß nun ohnehin Motoren an der Kamera / am Gimbal vorhanden sind, nutzt mal dies, um die Kamerabewegung zusätzlich fernsteuern zu können. Der Gimbal wird in diesem Falle also nicht mehr nur zur Bildstabilisierung sondern auch zur aktiven Ausrichtung der Kamera per Fernsteuerung verwendet. Auch hier unterscheiden sich die Gimbals darin, in welchen Dimensionen diese Steuerung möglich ist. Oft ist nur der Tilt – also die Neigung nach unten steuerbar. Bei aufwändigeren Modellen ist auch eine Steuerung in 2 oder gar 3 Dimensionen möglich (360° Gimbal). Oft wird dann aber für die Steuerung des Gimbals noch eine 2. Person eingesetzt, sodaß sich der Pilot aufs Fliegen konzentrieren kann (Beispiel: Dji Inspire 1 mit Dual Control Remote).











Neben den Drohnen-Gimbals gibt es kürzlich auch eine interessante Entwicklung: nicht nur für RC-Drohnen und Flugzeuge / fliegende Objekte werden Gimbals eingesetzt. Auch für die normale Kameraführung per Hand gibt es mitlerweile Handheld-Gimbals, die die alten mechanischen Steadycam-Gimbals (Schwebestativ) wohl bald ersetzen. Sowohl im Hobby-Bereich (z.B. für goPro Hero3 oder goPro Hero 4) als auch für professionelle Film- und Videoaufnahmen (DSLC Kameras) bis hin zu Kinoproduktionen (Dji Ronin).
Auch dazu gibt es von uns Testberichte und Vergleiche: Top10 Handheld Gimbals
Hier mal eine Veranschaulichung im Video:



weitere Informationen zum Thema finden Sie hier im Forum: Gimbal und Kameras

